![]()
027-87771780
1小時響應 | 三年質保 | 終身維護 | 廠家直供

及時聯系我們為您解答產品相關疑問 歡迎撥打全國統一服務熱線
![]()
銷售電話: 027-8777 1781
027-8777 1782
服務電話: 133 9713 6633
傳真電話: 027-8777 1786
電子郵箱: whhdgk@126.com
值得注意的是,繼電測式儀試驗期間,通過改變測試儀某一相電流至保護動作,此時微機繼電保護測式儀輸出的電流并非動作電流或制動電流,更不能受差動繼電器的動作原理影響,認為加在高壓側的就是動作電流,加在低壓側的就是制動電流。微機差動保護并不是直接比較高低壓側的電流大小動作的,而是判斷是否滿足上述的動作方程。那微機繼電保護測式儀高、低壓側電流與差動電流、制動電流的關系是怎樣的呢?
一般,國內保護的差動電流均采用:Id = | Ih + Il |,可表述為:差動電流等于高、低壓側電流矢量和的絕對值,因此必須注意加在保護高低壓側電流的方向。
制動電流的方程則各個品牌和型號的保護往往不同,國內保護最常見的公式有以下三種:
1. Ir = max{ | Ih |,| Il | }:正確的表述為:制動電流等于高、低壓側電流幅值的最大值;
2. Ir = ( | Ih | + | Il | ) / K :正確的表述為:制動電流等于1/K倍的高、低壓側電流幅值之和;
3. Ir = | Il | :正確的表述為:制動電流等于低壓側電流的幅值。
公式2 中的K值大部分保護為2,個別保護為1。
另外兩個公式有的保護也會采用:Ir = | Ih - Il | / K ,Ir =( | Id | - | Ih | - | Il | )/ K 。實際上,試驗時記錄下的保護臨界動作時測試儀輸出的IA、IB的電流值都不能等同與上述的高、低壓側電流,因為還得考慮高低壓側的平衡系數。假設測試儀IA輸出給高壓側,IB輸出給低壓側,高低壓側的平衡系數分別為 K1、K2,則高低壓側的電流為:Ih = K1 * IA,Il = K2 * IB。再代入差動電流和制動電流的公式去求出相應的差動電流和制動電流。

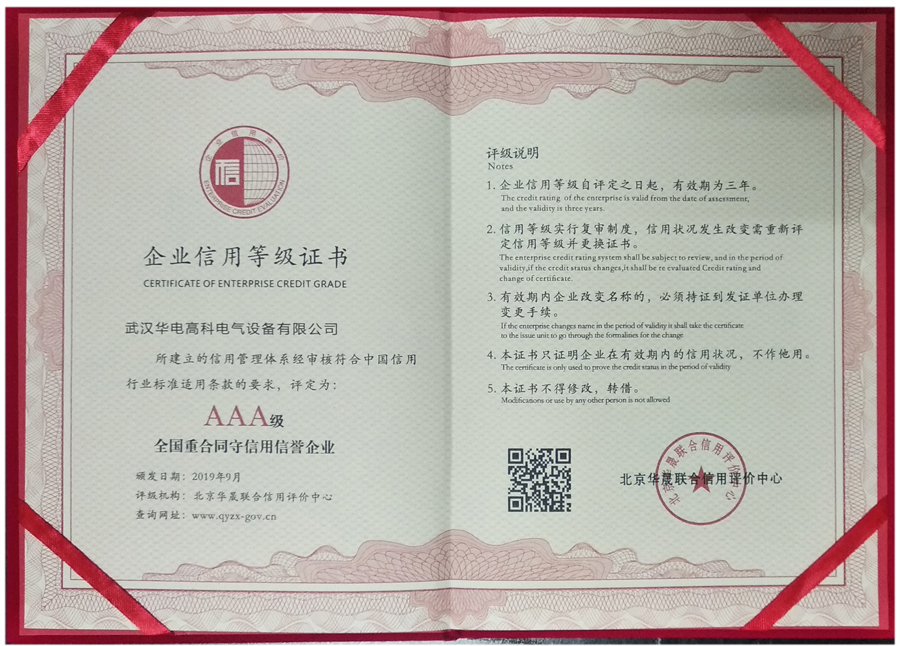
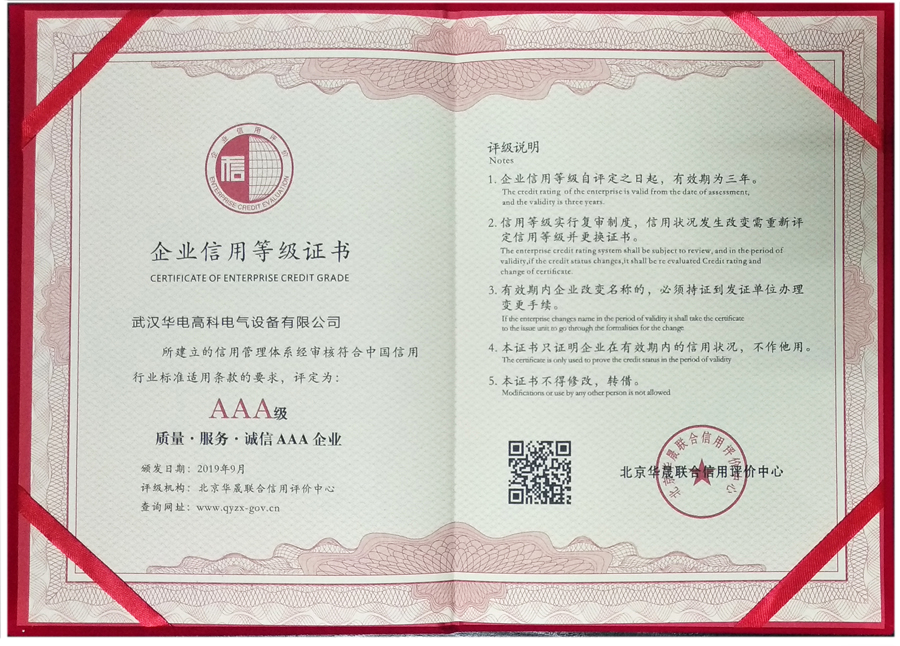
榮譽客戶











Copyright © 2002-2013 武漢華電高科電氣設備有限公司 All Rights Reserved. 鄂ICP備09002799號-3 鄂公網安備 42018502002567號 ![]()

TELEPHONE
![]() 公司地址:武漢東湖高新技術開發區光谷
總部國際創智園5號樓
公司地址:武漢東湖高新技術開發區光谷
總部國際創智園5號樓
![]() 傳真:027-87771786
傳真:027-87771786
![]() 電話:027-87771781
電話:027-87771781